

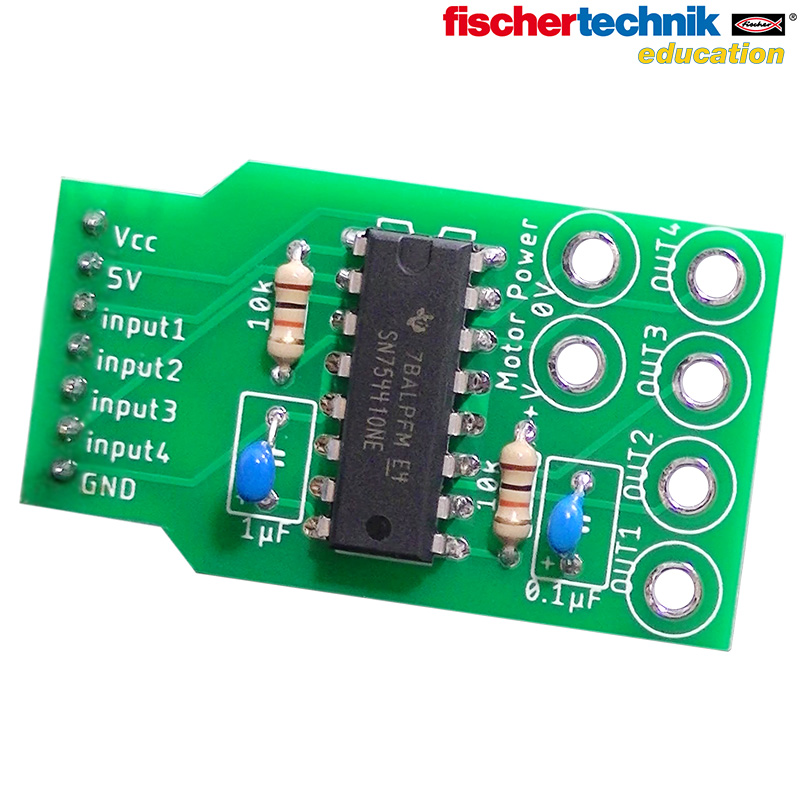
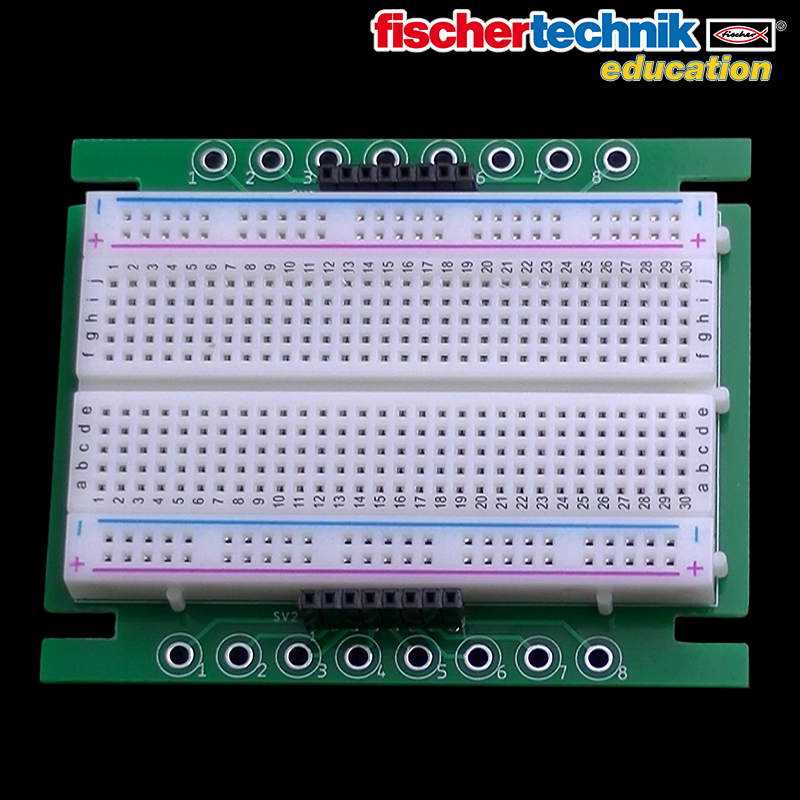
モータードライバ基板
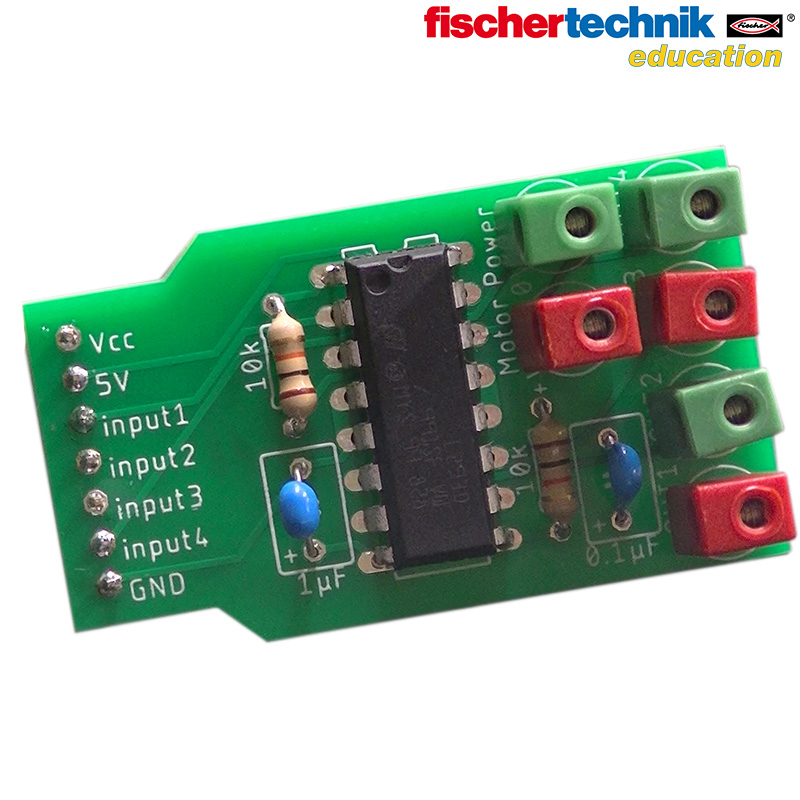
fischertechnik educationのオリジナル基板!
フィッシャーテクニックの9V・24Vのアクチュエーターを色々なコンピューターで活用できるようになります。
![]()
RaspberryPi(ラズベリーパイ)、Arduino、micro:bit、M5Stackなどお好みのコンピューターでモーターなどのアクチュエーターを使用可能です。



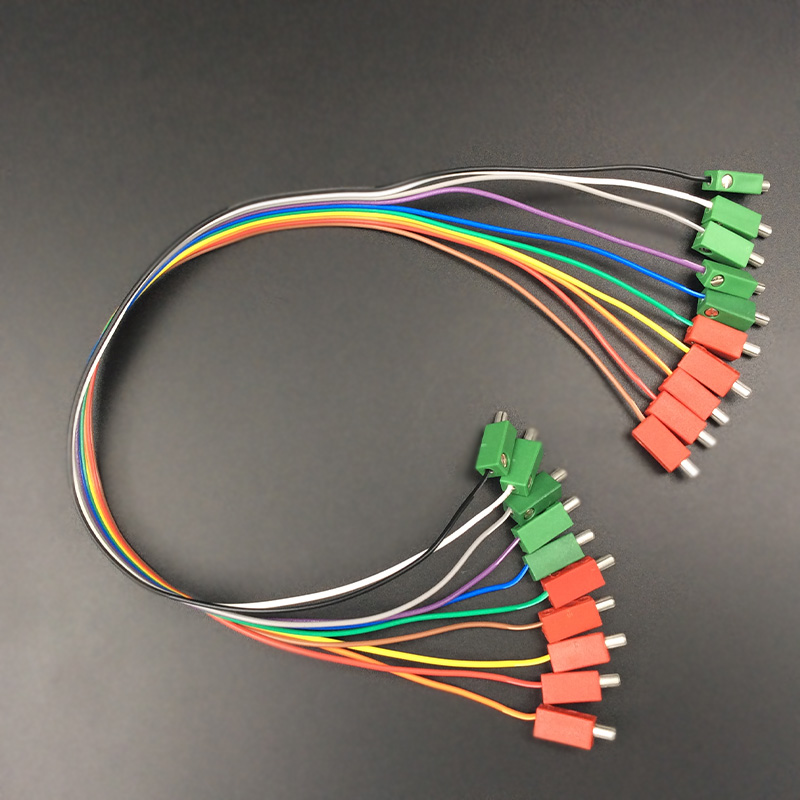
フィッシャーテクニックのプラグ(赤色3つ・緑色3つ)が付属しています。
一般的な電子工作で使用されるケーブルを使用することも可能です。

ご購入はこちらから

| ||
|---|---|---|
|
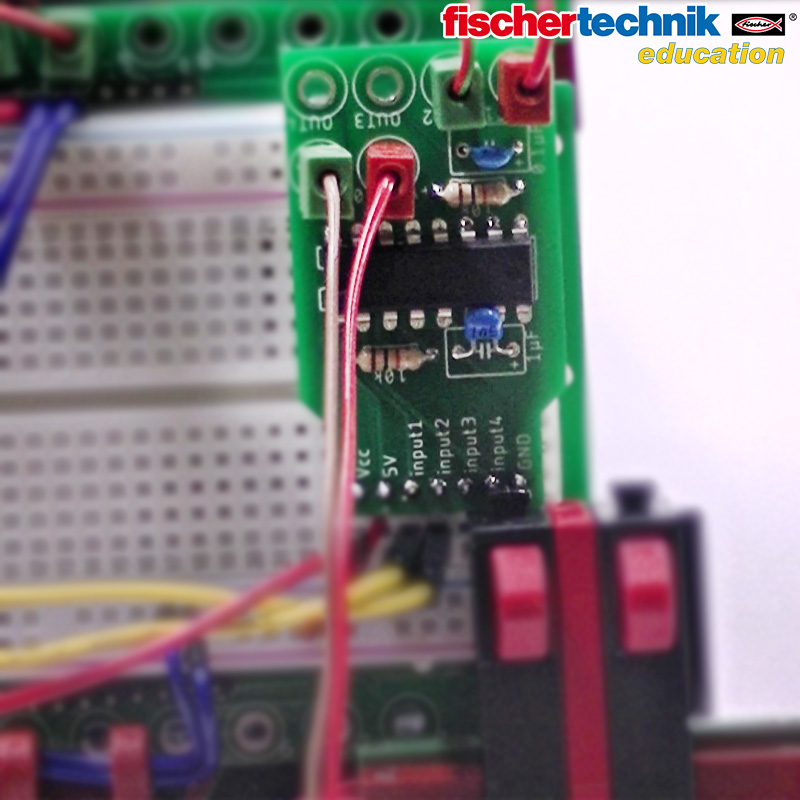
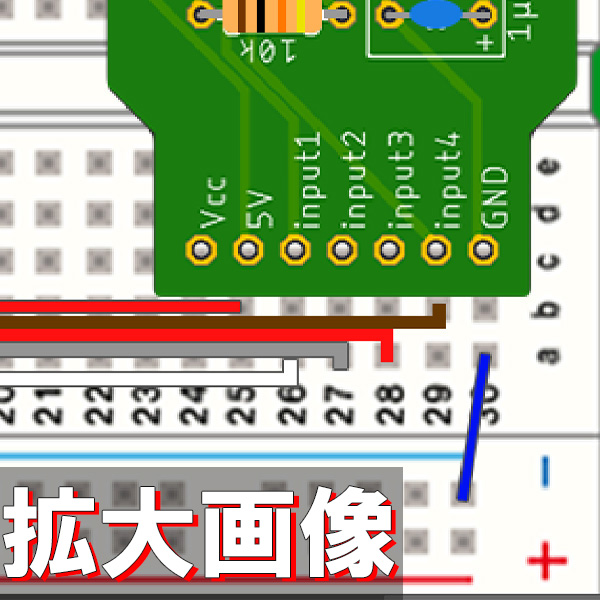
配線イラスト 
| ||
/*
* モータードライバのサンプルプログラム M5Stack CORE2用
* sample program for for M5Stack CORE2
*
* 電源を入れるとディスプレイにフィッシャーくんの顔が表示されます。
* 『左ボタン』を押すとデフォルトの顔
* 『中央ボタン』を押すと白目をキョロキョロ
* 『右ボタン』を押すとまばたきの様な動き
*
* Fisher's face is displayed when the power is turned on
* 『LEFT BUTTON』- show defoult face
* 『CENTER BUTTON』- eyes move
* 『RIGHT BUTTON』- blink
*/
// 必要ライブラリのインクルード
#include <M5Core2.h>
#include "img.h" // 画面の描画用
#include "motor.h" // モーターの動作
void setup() {
M5.begin();// 初期化
// === LCD初期設定 ===
lcd.init(); // LCD初期化
lcd.setRotation(1); // 画面向き設定
canvas.setColorDepth(8); // カラーモード設定(書かなければ初期値は16bit)
colorvalue01 = lcd.color565(218, 130, 93);// 肌の色
colorvalue02 = lcd.color565(89, 84, 90);// 目の色(黒目)
colorvalue03 = lcd.color565(255, 255, 255);// 目の色(白目)
canvas.setTextWrap(false); // 改行をしないように設定
canvas.createSprite(lcd.width(), lcd.height()); // canvasサイズ
// ======================
//出力の設定
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
pinMode(M3, OUTPUT);
pinMode(M4, OUTPUT);
// モーターOFF
digitalWrite(M1, LOW);
digitalWrite(M2, LOW);
digitalWrite(M3, LOW);
digitalWrite(M4, LOW);
back_img(); // 背景画像
defoult_face();// 顔の表示
delay(1000);
}
void loop() {
static bool touch = false; // 画面が触れられているの状態を変数へと格納
TouchPoint_t pos = M5.Touch.getPressPoint(); // 座標を変数へと格納
// Yが240以上 (ボタンのエリア)
if (pos.y > 240) {
// 左のボタン
if (pos.x < 109) {
defoult_face();
front();
delay(100);
back();
}
// 中央のボタン
else if (pos.x >= 109 && pos.x <= 218) {
move_eye();
left();
delay(100);
right();
}
// 右のボタン
else if (pos.x > 218) {
blink_eye();
right();
delay(100);
left();
}
delay(300); // 遅延時間(ms)
}
}
|
||
|


| ||
|---|---|---|
|
配線イラスト 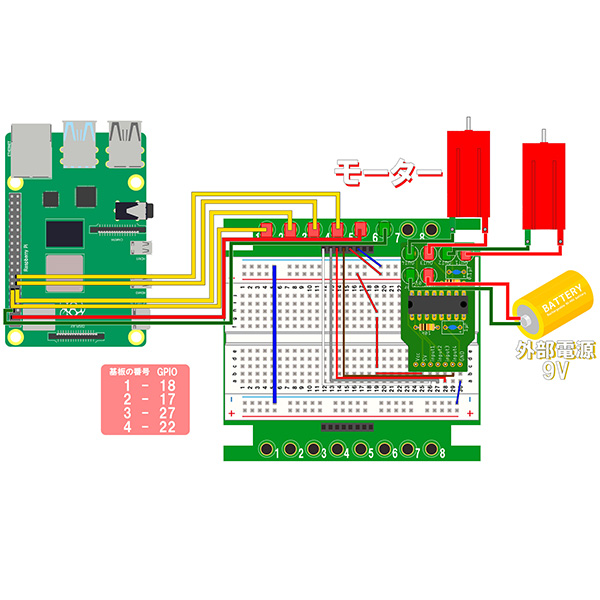
| ||
|
||
|
| ||
|---|---|---|
|
配線イラスト 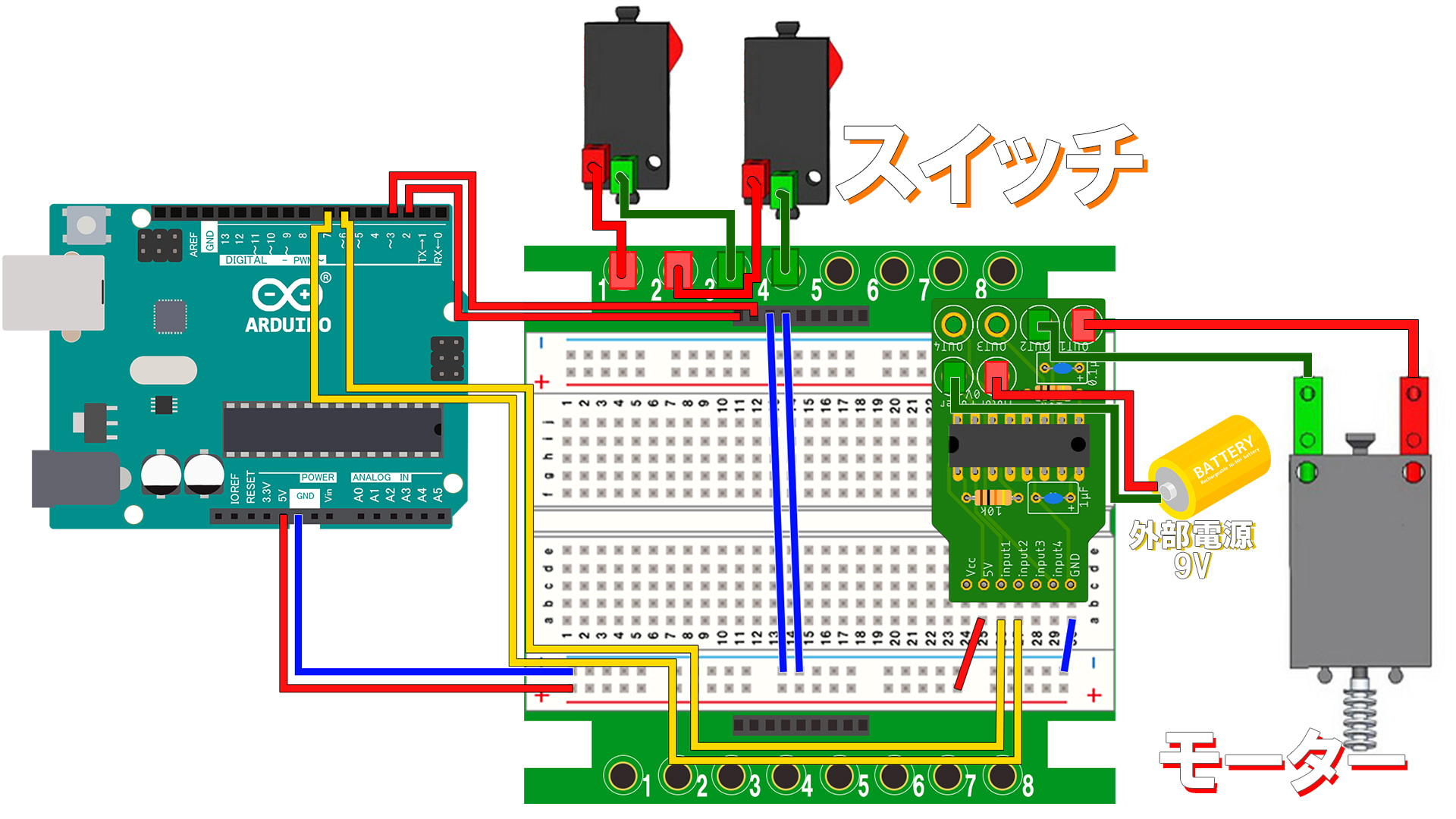
| ||
/*
モータードライバサンプルプログラム
Motor driver sample program
DCモーター1つ スイッチ2つを使用
Uses 2 DC motors and 2 Switches
sw1を押すと『開く』 sw2を押すと『閉じる』
Press sw1 to open. Press sw2 to close.
*/
// モーター motor
int ma = 6;
int mb = 7;
// スイッチ switch
int sw1 = 2; // OPEN
int sw2 = 3; // CLOSE
void setup() {
// 出力
pinMode(ma, OUTPUT);
pinMode(mb, OUTPUT);
// 入力
pinMode(sw1, INPUT);
pinMode(sw2, INPUT);
}
void loop() {
// OPEN 『←』に向かう
if (digitalRead(sw1) == 1 && digitalRead(sw2) == 0) {
digitalWrite(ma, 1);
digitalWrite(mb, 0);
delay(100);
}
// CLOSE 『→』に向かう
else if (digitalRead(sw2) == 1 && digitalRead(sw1) == 0) {
digitalWrite(ma, 0);
digitalWrite(mb, 1);
delay(100);
}
// 停止
else {
digitalWrite(ma, 0);
digitalWrite(mb, 0);
}
}
|
||
|
フィッシャーテクニックのパーツと組み合わせられるケーブルやプラグも販売中!


ご購入はこちらから